カテゴリ別
最近、家電量販店に足を運ぶとたくさんのロボット掃除機が並んでいます。
今回はロボット掃除機について詳しく説明したいと思います。
現行のロボット掃除機は大きく分けると2つのタイプが存在します。 まずは行動規範タイプ。このタイプはとにかく部屋の中を動き回ります。障害物にぶつかってから先に進めないことを理解するものや、障害物を認識しながら条件反射的に回避するものがありますが、どちらも部屋の中を動き回ることによって大まかな地図を作成します。どの位置に障害物があって、どのコースを進めばよいのか…など、そのための地図を作成しているのです。 加えて、効率よく掃除をするためのプログラムがなされているため、地図上に配置された障害物を考慮して、最短距離で部屋の中を動くにはどのようなコースがいいのかまで学習していくのです。行動範囲は効率を考えたコース作りだけでなく、ゴミを吸い取る場合にもしっかり学習していきます。例えば、「いつもこの辺りはゴミが多いから、ゴミを吸い込むために出力を上げてみよう」や、「この辺りはゴミが少ないから、出力を下げて省エネしよう」などといった具合です。 続いて説明するのが、SLAM技術を駆使したタイプについて。まず、自分がどこにいるのかを判断するのがローカリゼーション。ローカリゼーションとは、一般的に局地化、地域化と説明されることが多いですが、ロボット掃除機においては自分の位置を知ることを意味します。常に自分が部屋のどこにいるのかをリアルタイムで確認していて、さらに部屋の地図作成も同時に行います。これがSLAM(Simultaneous Localization & Mapping)という技術です。 SLAM技術を採用しているとロボット掃除機は、動く前に部屋の状態をスキャンします。これで自分がいる場所の周辺にある障害物を事前に把握でき、部屋全体を把握しながら同時に地図を作成する。その作成した地図を確認しながら、効率のよい掃除を計画するというわけです。 技術的にはSLAMの方が優れているかもしれませんが、SLAM技術を採用したロボット掃除機は数が少ないので、家電量販店などで目にするのは行動規範タイプになるでしょう。もちろんSLAMタイプのロボット掃除機を購入することは可能です。
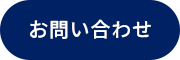
ちなみに、ロボットといっても人工の目があるわけではなく、カメラのようなもので確認しながら動いているわけでもありません。どのようにして障害物を把握して、ゴミを探すのでしょうか。まず、障害物を把握するためにはいくつかの方法があります。 1つ目は、自身で衝突してから地図上に障害物があることを追加していくもの。 2つ目は赤外線センサーを用いて事前に障害物を検知しながら回避していくもの。 赤外線センサーを用いたものに、もう少し付け加えて超音波センサーで支援してもらうものが存在します。赤外線は発信して障害物に当たると戻ってきます。戻ってくるってことで、障害物の位置や距離を把握していくのですが、赤外線が透過してしまう障害物もあるからです。
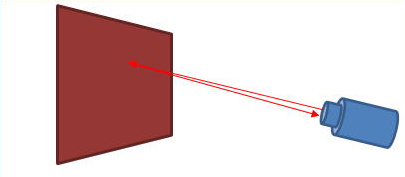
例えば、テレビのリモコン。リモコンの前にガラスなどを置いて操作するとどうなりますか?赤外線は透過してしまう場合があるため、これを支援するのが超音波センサーというわけです。
このように赤外線が透過してしまうような場合でも、超音波が見逃さないのです。 次にゴミを探す方法ですが、音には周波数があることを利用します。例えば、大きなゴミを吸い込んだ場合には、吸引するときの周波数帯が変わります。それによって、たくさんのゴミが溜まっていることを検知して出力を上げ、その場に停滞して周波数帯の変化を確認しながらゴミがなくなるのを確認しているというわけです。 このようにロボット掃除機は非常に賢いわけですが、センサーがたくさん付いているロボット掃除機が良いとは一概には言えません。それだけ高額になりますし、使用するにあたり、どのタイプのものが妥当か検証する必要がありますね。